| Статьи » Разработки |
Работаем с STM32 и многоканальным АЦП используя DMA
|
2020-02-11 в 15:45 (последнее изменение 2021-03-09 в 01:37)
Когда мы хотим сделать одно преобразование одного канала АЦП - мы ждем результата АЦП в цикле, который не является эффективным способом использования ресурсов процессора. Лучше запустить преобразование и дождаться полного прерывания преобразования. Таким образом, процессор может выполнять другие задачи, а не ждать завершения преобразования АЦП. На этот раз мы рассмотрим другой пример, в котором мы настроим более одного канала и прочитаем значения АЦП, используя процедуру обслуживания прерываний.
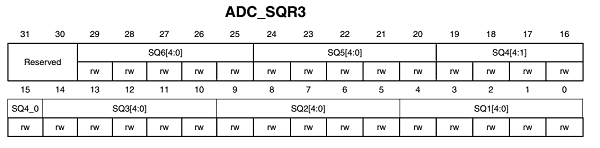
Как работает многоканальное преобразование АЦП?Если нам нужно преобразовать несколько каналов непрерывно, нам нужно настроить регистры последовательности (ADC_SQRx). Существует три регистра последовательности: ADC_SQR1, ADC_SQR2 и ADC_SQR3, где мы можем установить максимум 16 каналов в любом порядке. Последовательность преобразования начинается с настроек SQ1 [4: 0] в регистре ADC_SQR3. Биты [4: 0] содержат номер канала АЦП.
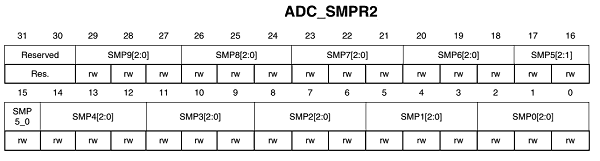
Все 16 последовательных каналов могут быть установлены одинаково через все регистры SQR. Затем в регистре ADC_SQR1 есть четыре бита, помеченные как L [3: 0], где вы можете установить число повторений чтения последовательности. Еще одна вещь, о которой нам нужно позаботиться - установить время выборки для каждого канала. Как мы знаем, каждый канал в последовательности может быть установлен на разное время преобразования. Время выборки для каждого канала может быть установлено в двух регистрах: ADC_SMPR1 и ADC_AMPR2. Есть три бита для каждого канала в последовательности.
Если вы используете стандартную периферийную библиотеку, настройка многоканального АЦП становится и легкой задачей. Настройка многоканального преобразования АЦП с записью DMAДавайте напишем пример, где мы будем читать первые 8 каналов АЦП четыре раза, используя режим сканирования. Затем мы вычисляем среднее значение каждого канала и затем выводим результаты на экран терминала с помощью UART. Мы запишем значения АЦП в память, используя канал DMA. Как только все данные будут сохранены в памяти, будет сгенерировано полное прерывание передачи DMA для запуска усреднения и вывода. В техническом описании STM32F100x мы находим, что выводам АЦП назначены альтернативные функции следующим образом:
Для первых восьми каналов нам необходимо установить контакты A0 - A7 в качестве аналоговых входов. Затем мы можем настроить режим преобразования АЦП. Кроме того, нам нужно настроить режим преобразования сканирования, чтобы иметь возможность проходить по всем каналам, выбранным в регистрах ADC1_SQRx. В периферийной библиотеке это выглядит так: Код
ADC_InitStructure.ADC_ScanConvMode = ENABLE;
Затем мы должны включить режим непрерывного преобразования, поскольку мы хотим несколько раз циклически переключаться между списками каналов: Код
ADC_InitStructure.ADC_ContinuousConvMode = ENABLE;
Затем мы указываем количество каналов для преобразования в режиме сканирования: Код
ADC_InitStructure.ADC_NbrOfChannel = 8;
Следующая вещь - указать, какие каналы и в каком порядке нам нужно конвертировать. Для этого мы настраиваем каждый канал индивидуально с помощью команд: Код
ADC_RegularChannelConfig(ADC1, ADC_Channel_0, 1, ADC_SampleTime_41Cycles5);
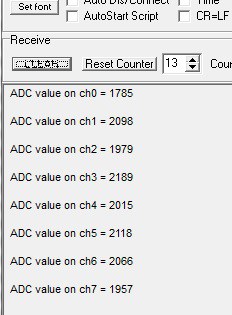
ADC_RegularChannelConfig(ADC1, ADC_Channel_1, 2, ADC_SampleTime_41Cycles5); ADC_RegularChannelConfig(ADC1, ADC_Channel_2, 3, ADC_SampleTime_41Cycles5); ADC_RegularChannelConfig(ADC1, ADC_Channel_3, 4, ADC_SampleTime_41Cycles5); ADC_RegularChannelConfig(ADC1, ADC_Channel_4, 5, ADC_SampleTime_41Cycles5); ADC_RegularChannelConfig(ADC1, ADC_Channel_5, 6, ADC_SampleTime_41Cycles5); ADC_RegularChannelConfig(ADC1, ADC_Channel_5, 7, ADC_SampleTime_41Cycles5); ADC_RegularChannelConfig(ADC1, ADC_Channel_7, 8, ADC_SampleTime_41Cycles5); Я выбрал все восемь каналов подряд от 0 до 7. Но вы можете изменить числа, как вам нравится. Остальное - настроить DMA, где он копирует значения АЦП в память при каждом событии EOC. После того, как DMA копирует заранее определенное количество значений, оно генерирует прерывание. Тогда мы можем манипулировать данными так, как нам нравится. Как и в нашем примере, мы усредняем несколько экземпляров. Это результат на экране терминала.
Вы можете подключить потенциометр или любой другой аналоговый датчик к каждому каналу, чтобы увидеть его значение АЦП. Рабочий код на C многоканального АЦПВот полный основной исходный код, если вы хотите проанализировать или использовать фрагменты для своих целей: Код
// Includes --------------*/
#include "stm32f10x.h"
#include "usart.h"
#include <stdio.h>
#define ARRAYSIZE 8*4
#define ADC1_DR ((uint32_t)0x4001244C)
volatile uint16_t ADC_values[ARRAYSIZE];
volatile uint32_t status = 0;
void ADCInit(void);
void DMAInit(void);
int main(void)
{
uint8_t index;
//initialize USART1
Usart1Init();
ADCInit();
DMAInit();
//Enable DMA1 Channel transfer
DMA_Cmd(DMA1_Channel1, ENABLE);
//Start ADC1 Software Conversion
ADC_SoftwareStartConvCmd(ADC1, ENABLE);
//wait for DMA complete
while (!status){};
ADC_SoftwareStartConvCmd(ADC1, DISABLE);
//print averages
/*for(index = 0; index<8; index++)
{
printf("ch%d = %d ",index, ADC_values[index]);
}*/
for(index = 0; index<8; index++){
printf("\r\n ADC value on ch%d = %d\r\n",
index, (uint16_t)((ADC_values[index]+ADC_values[index+8]
+ADC_values[index+16]+ADC_values[index+24])/4));
}
while (1)
{
//interrupts does the job
}
}
void ADCInit(void){
//--Enable ADC1 and GPIOA--
RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1 | RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure; //Variable used to setup the GPIO pins
//==Configure ADC pins (PA0 -> Channel 0 to PA7 -> Channel 7) as analog inputs==
GPIO_StructInit(&GPIO_InitStructure); // Reset init structure, if not it can cause issues...
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1| GPIO_Pin_2| GPIO_Pin_3| GPIO_Pin_4| GPIO_Pin_5| GPIO_Pin_6| GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN;
GPIO_Init(GPIOA, &GPIO_InitStructure);
ADC_InitTypeDef ADC_InitStructure;
//ADC1 configuration
ADC_InitStructure.ADC_Mode = ADC_Mode_Independent;
//We will convert multiple channels
ADC_InitStructure.ADC_ScanConvMode = ENABLE;
//select continuous conversion mode
ADC_InitStructure.ADC_ContinuousConvMode = ENABLE;//!
//select no external triggering
ADC_InitStructure.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None;
//right 12-bit data alignment in ADC data register
ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right;
//8 channels conversion
ADC_InitStructure.ADC_NbrOfChannel = 8;
//load structure values to control and status registers
ADC_Init(ADC1, &ADC_InitStructure);
//wake up temperature sensor
//ADC_TempSensorVrefintCmd(ENABLE);
//configure each channel
ADC_RegularChannelConfig(ADC1, ADC_Channel_0, 1, ADC_SampleTime_41Cycles5);
ADC_RegularChannelConfig(ADC1, ADC_Channel_1, 2, ADC_SampleTime_41Cycles5);
ADC_RegularChannelConfig(ADC1, ADC_Channel_2, 3, ADC_SampleTime_41Cycles5);
ADC_RegularChannelConfig(ADC1, ADC_Channel_3, 4, ADC_SampleTime_41Cycles5);
ADC_RegularChannelConfig(ADC1, ADC_Channel_4, 5, ADC_SampleTime_41Cycles5);
ADC_RegularChannelConfig(ADC1, ADC_Channel_5, 6, ADC_SampleTime_41Cycles5);
ADC_RegularChannelConfig(ADC1, ADC_Channel_5, 7, ADC_SampleTime_41Cycles5);
ADC_RegularChannelConfig(ADC1, ADC_Channel_7, 8, ADC_SampleTime_41Cycles5);
//Enable ADC1
ADC_Cmd(ADC1, ENABLE);
//enable DMA for ADC
ADC_DMACmd(ADC1, ENABLE);
//Enable ADC1 reset calibration register
ADC_ResetCalibration(ADC1);
//Check the end of ADC1 reset calibration register
while(ADC_GetResetCalibrationStatus(ADC1));
//Start ADC1 calibration
ADC_StartCalibration(ADC1);
//Check the end of ADC1 calibration
while(ADC_GetCalibrationStatus(ADC1));
}
void DMAInit(void){
//enable DMA1 clock
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_DMA1, ENABLE);
//create DMA structure
DMA_InitTypeDef DMA_InitStructure;
//reset DMA1 channe1 to default values;
DMA_DeInit(DMA1_Channel1);
//channel will be used for memory to memory transfer
DMA_InitStructure.DMA_M2M = DMA_M2M_Disable;
//setting normal mode (non circular)
DMA_InitStructure.DMA_Mode = DMA_Mode_Normal;
//medium priority
DMA_InitStructure.DMA_Priority = DMA_Priority_High;
//source and destination data size word=32bit
DMA_InitStructure.DMA_PeripheralDataSize = DMA_PeripheralDataSize_HalfWord;
DMA_InitStructure.DMA_MemoryDataSize = DMA_MemoryDataSize_HalfWord;
//automatic memory destination increment enable.
DMA_InitStructure.DMA_MemoryInc = DMA_MemoryInc_Enable;
//source address increment disable
DMA_InitStructure.DMA_PeripheralInc = DMA_PeripheralInc_Disable;
//Location assigned to peripheral register will be source
DMA_InitStructure.DMA_DIR = DMA_DIR_PeripheralSRC;
//chunk of data to be transfered
DMA_InitStructure.DMA_BufferSize = ARRAYSIZE;
//source and destination start addresses
DMA_InitStructure.DMA_PeripheralBaseAddr = (uint32_t)ADC1_DR;
DMA_InitStructure.DMA_MemoryBaseAddr = (uint32_t)ADC_values;
//send values to DMA registers
DMA_Init(DMA1_Channel1, &DMA_InitStructure);
// Enable DMA1 Channel Transfer Complete interrupt
DMA_ITConfig(DMA1_Channel1, DMA_IT_TC, ENABLE);
DMA_Cmd(DMA1_Channel1, ENABLE); //Enable the DMA1 - Channel1
NVIC_InitTypeDef NVIC_InitStructure;
//Enable DMA1 channel IRQ Channel */
NVIC_InitStructure.NVIC_IRQChannel = DMA1_Channel1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
Не пропустите обновления! Подписывайтесь на нашу группу Вконтакте. Так же у нас есть Telegram канал. Вам понравился наш материал? Поделитесь с коллегами! Просмотров: 14844. Оценка статьи: 3.5 из 5. Уже оценило 22 читателя  |

| Всего комментариев: 1 | ||
| ||



